|
A SHADOW OVER THE HORIZON, THE BELL X-2 by Robert W. Kempel with Richard E. Day
Conception of the X-2
In September 1945, World War II officially ended. The stimulus of war had induced accelerated research and development of technology in almost every field of endeavor. Few technological fields experienced the radical and rapid advances that occurred in aviation. In aviation for example jet propulsion was refined and operationally introduced rather dramatically in European skies in 1944. The future of airplane propulsion was here. This new method of propulsion, with its capacity of producing significantly higher speeds, now complicated the field of airframe aerodynamics. It was soon learned that there was an aerodynamic barrier or problem to be conquered before airplanes could achieve their full potential using jet propulsion. This problem was identified as the so called "Sound Barrier."
In 1945, the speed of sound was thought, by some in aviation, to be an impenetrable barrier beyond which no airplane could ever hope to fly. Up to this time all the WW II fighters that had approached the alleged barrier of sound had met with disaster or very narrowly escaped. Although some thought the idea of a "sound barrier" was only a myth to be shattered.
In early 1944, the U. S. Army Air Force (AAF), Engineering Division at Wright Field, Ohio, had developed a plan for High-Speed Flight Investigations simply known as Project-524. This plan, with broad objectives, as communicated to industry called for a proposed experimental rocket powered research airplane to explore the effects of compressibility at or near the speed of sound. This was the AAF's Mach 0.999 rocket-powered airplane program. Bell Aircraft Corporation in Buffalo, New York, the only credible industry respondent, won the contract in late 1944, for the design and construction of three air-launched airplanes known as the Experimental Sonic-1 or shortened to XS-1. In late December 1945, Bell Aircraft at their Niagara Falls, New York, plant rolled-out the first of three XS-1 airplanes (serial number 46-062, tail number 6062). The XS-1 was a small bullet shaped rocket-powered airplane with a straight thin-wing, the realization of Project-524 that was destined to leave its mark in aviation history. This airplane's sole significant objective was to shatter the sound barrier, to go where no other airplane had gone before.
In September 1945, the same month WW II ended, the Bell engineers, not merely content with shattering the sound barrier with their XS-1, proposed an entirely new and bolder rocket-powered research airplane, known as Model 52, that was very advanced. It's fair to say that the saffron-colored paint was hardly dry or even applied on the XS-1 when, on December 14, 1945, the company's proposal to build the Model 52 was presented and accepted by the USAAF as Project MX-743. This airplane would be known as the XS-2 (later the X-2). The X-2 wasn't a reworked or warmed-over version of the XS-1, but an entirely new and radical concept in experimental airplane design. This revolutionary airplane was to have a 40 degree wing sweep and designed to achieve a Mach number somewhere around 3 and altitudes above 100,000 feet (30,480 m). Mach 1, the shattering of the so called Sound Barrier, had not been conquered by a piloted airplane yet and they were proposing one that would go three times as fast. The Bell engineers apparently didn't believe that a "sound barrier" existed. In 1945, all Bell's experimental rocket airplanes were highly classified secrets and a Mach 3 airplane was almost beyond belief. Very bold steps indeed!
The X-2 and its Objective — Flights to the Fringe of Space
The X-2's objective was to investigate the aerodynamic stability and control characteristics of swept-wing configurations at speeds and altitudes significantly beyond those of the XS-1 (later known as the X-1). The design Mach number was to be 3 where aerodynamic heating would be encountered in a piloted airplane for the very first time. This idea was generally unheard of in the aeronautical community and was indeed advanced thinking.
To say the Bell X-2 was a shadow on the horizon of the future is not an exaggeration. The X-2 was indeed a bold, almost audacious, step in experimental airplane design in 1945, and can be said that it was an airplane before its time. This airplane pushed the middle and late 1940's aeronautical technology disciplines to their absolute limits and beyond. Some of these technologies were extensions of the X-1's development, new ideas, and included what had been secret German Luftwaffe concepts that were available to Bell Aircraft in mid 1945, with the cessation of hostilities in Europe.
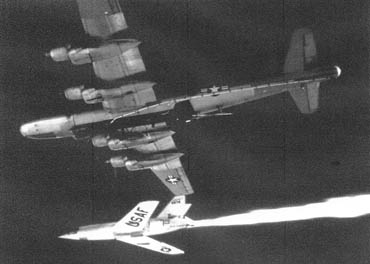
Unlike the three X-1s that were built, it was decided that two X-2 airframes (s/n 46-674 and 46-675) would be fabricated and that Bell Aircraft and the USAAF would conduct the initial flight test program with the National Advisory Committee for Aeronautics (NACA the predecessor of NASA) acting, initially, in an advisory and support role. The high speed tests would be conducted at the USAAF's remote Muroc (later Edwards) Base in California's Mojave Desert. Bell would do the preliminary captive flight systems demonstration program from its Buffalo, NY facility. Unlike the X-1 the launch airplane would be a Boeing B-50 rather than a B-29.
Proposed and actual design features of the X-2 included:
The United States Air Force (USAF) was established as an entirely separate branch of the armed forces on September 18, 1947. This new service would soon be basking in the glory of the not very well kept highly classified secret of having "pierced the dread [sound] barrier," as newspapers reported in headlines, with a mysterious airplane the press called the "XS-1 rocket plane."
As now known, Captain Charles E. Yeager piloting the XS-1 (tail number 6062) broke the mythical sound barrier on October 14, 1947. As a result of this history making flight this airplane is now a centerpiece in the Smithsonian Air & Space Museum as the world's first supersonic airplane.
On December 8, 1949, Muroc AFB was renamed Edwards AFB in honor of Capt. Glen W. Edwards who had been killed in the experimental Northrop YB-49 flying wing. With the passing of time, around 1952, Muroc Dry Lake would become known by its other locally familiar name, Rogers Dry Lake. Edwards is now the home of the Air Force Flight Test Center (AFFTC), the famous USAF Test Pilot School, NASA Dryden Flight Research Center, and numerous independent aerospace contractor facilities.
With the breaking of the sound barrier an entirely new era of aeronautical design and flight test activity was to now be initiated. The center of all this activity was on and around the USAF base at Muroc. This was an unprecedented era in the generation of new ideas within the aeronautical development and manufacturing community. The USAF endorsed, encouraged, and financed many of the new ideas and provided an ideal location for experimentation. This was, indeed, to be the "Mach Busting" golden age of flight testing at Edwards.
The United States Navy would also play a role in flight testing at Edwards although their airplanes would not enjoy the more romantic specific designation of X-airplane. For example, the Douglas D-558-1 and D-558-2 were significant Navy experimental programs, but lacked the "X" designation.
The Evolution of the X-2
As might be imagined, with such an ambitious program, Bell Aircraft engineers and subcontractors encountered technical and manufacturing difficulties from the very beginning. Technologically speaking the X-2 was a quantum leap from that of the X-1. Serious structural fabrication, propulsion system, and flight control system problems were encountered as work progressed. Each of these disciplines required something new to be developed.
To be a success and to meet program or intended objectives every airplane must possess four fundamental satisfactory elements. These include: (1) structural integrity, (2) acceptable airframe aerodynamics, (3) a functional and reliable propulsion system, and (4) an adequate flight control system to perform the mission. These must be integrated into a single unit and perform satisfactorily throughout the airplane's intended speed, altitude, and "g" loading range without fail or with limited specified failures.
The rocket engine. The throttleable rocket engine was developed by Curtiss-Wright and designated the XLR 25-CW-3 and presented its own set of unique problems. Maximum static sea level thrust of this dual chambered rocket ranged from 5,000 pounds (22,241 N) for the upper chamber to 10,000 pounds (44,482 N) for the lower chamber. The dual rocket chambers were designed to operate together or individually. Throttle operation range was from 50 to 100 percent thrust. Pump-fed propellant flow was regulated to maintain the airplane center of gravity for preservation of static stability. Development and flight-qualification of this rocket engine delayed the X-2 several years. Imagine, in 1949, the enormous challenge and real difficulties in developing a throttleable dual chamber rocket engine.
The proposed flight control system abandoned. The development of the Bendix Corporation electrical-powered fly-by-wire flight control system had to be abandoned by 1952. The technology simply was not mature enough to bring this system to an operational airplane such as the X-2. This flight control system was replaced by what would become a more conventional hydraulic power-boosted irreversible system for the ailerons and horizontal stabilizer. This system was not much more advanced than that of a typical WW II fighter.
Rudder control used an antiquated all-mechanical conventional pilot's cockpit pedal with a cable-pulley-bellcrank linkage system. An operational requirement dictated that before supersonic speed was approached the rudder was required to be manually locked in place. Returning to subsonic flight the rudder was to be unlocked. The requirement to lock the rudder was to preclude shock wave, Mach effect, disturbances from propagating forward to the cockpit via the mechanical linkage system.
Exactly why the X-2 program engineers decided that the rudder wouldn't be hydraulically powered is unknown. We can only speculate that perhaps the decision not to power the rudder was one of those cost-time development compromises. In addition, the supersonic aerodynamics were such that rudder coordination by the pilot, may have hindered rather than helped and was not absolutely necessary for the low maneuvering X-2 except with one very important exception.
Foreign Influence on the X-2 Design. There does appear that a foreign influence may have found its way into the design concept of the Bell X-2. The X-2 shares three specific major component design features in common with the late 1943 proposed British Miles Aircraft M.52 experimental straight-wing supersonic airplane. The three include:
The proposed British Miles Aircraft Company M.52 experimental supersonic turbojet airplane design was based on the Ministry of Aircraft Production Specification E.24/43 issued in late summer 1943 and abruptly, without official explanation, canceled in early 1946.
The concept of the supersonic biconvex airfoil can be specifically related back to Antonio Ferri and his 1939 or 1940 supersonic wind-tunnel tests in Guidonia, Italy. Also associated with the biconvex airfoil, by application of their supersonic pressure distribution theories to Ferri's test results, are the Swiss aerodynamicist Professor Jakob Ackeret (friend and contemporary of Theodore von Kármán) and Germany's Dr. Ing. Adolf Busemann (originator of the swept-wing concept).
The Flight Test Program
As a result of structural fabrication problems delays with rocket engine development and flight control system difficulties combined with operational delays that continued to plague the program it wasn't until early 1952, that Bell was able to conclude their captive flight tests and prepare for the move to California.
These combined difficulties delayed the first glide flight for several years and it finally took place at Edwards Air Force Base in the middle of 1952, with a Bell test pilot at the controls. In the spring of 1953, the number two airplane (tail number 6675) was lost during a captive mission, while being carried aloft by a B-50, in an explosion that occurred over Lake Ontario.
It wasn't until early August 1954 that the number one airplane (tail number 6674) was ready for the initial USAF glide tests at Edwards. The airplane was returned to Buffalo for repair of landing damage and for installation of the rocket engine in the spring of 1955. The first powered flight was conducted in late 1955, but the airplane sustained some minor fire damage in the engine bay. The X-2 didn't really begin serious operational research flight test and envelope expansion until early 1956, following minor repair. On March 24, the airplane resumed flight testing and flew throughout the spring and summer, completing a total of 11 successful powered flights.
The X-2 was the first piloted airplane to exceed 100,000 feet altitude when on the 12th powered flight it set an unofficial world's record of 126,200 feet (38,466 m) at Mach 1.7 on September 7, 1956.
On its next flight, on September 27, the X-2 became the world's first piloted airplane to exceed Mach 3 when it set a new world's speed record of Mach 3.20 (2,112 mph or 1835 kph) at 65,500 feet (19,964 m). Unfortunately the X-2 was lost when it exceeded a stability boundary and became uncontrollable at high Mach number.
Piloting the X-2
The following are excerpts from interviews and reports by various X-2 program engineers and pilots. Many of the now unclassified comments have not been widely publicized due to the nature of the X-2 program, but they present a general flavor that existed within the X-2 flight test program team and what it was like to fly the airplane.
The world's record of speed and altitude established by the X-2 were unofficial, although scientifically accurate, and not recognized or endorsed by the Fédération Aéronautique Internationale (FAI).
Three prominent USAF test pilots were assigned to fly the X-2. These were, in chronological order, Lt. Colonel Frank K. "Pete" Everest, Capt. Iven C. Kincheloe, and Capt. Milburn G "Mel" Apt. Lt. Colonel Everest flew a total of 12 flights beginning on August 5, 1954, and ending on July 23, 1956. Capt. Kincheloe flew a total of 4 flights beginning on May 25, 1956, and ending on September 7, 1956. Capt. Apt flew a single flight on September 27, 1956.
Record altitude. Capt. Kincheloe flew to a new albeit unofficial piloted altitude record when he reached 126,200 feet (38,466 m) on his last flight in the X-2. Capt. Kincheloe reported that, ". . . This height achievement was not only meaningful, in that I had over 99.6 [percent] of the earth's atmosphere below me and the concentration and nature of cosmic ray particles are the same as in actual space; therefore, space equivalent, but it is even more significant when one realizes the X-2 was a ten year old design." Capt. Kincheloe further reported that climbing for maximum altitude that, ". . . the [climb] attitude was still too steep for me to comfortably view the horizon. When the peak of the trajectory was attained, and the horizon was in view, I had a very quick observation of the general sky conditions. The light intensity within the cockpit and generally surrounding the aircraft appeared to me to be typically that of normal 40,000 ft conditions. Up sun the sky was blue-black in color and the sun appeared to be a very white spot. The sky conditions down sun, were even darker in color. This dark condition existed through the horizon where a dark gray band appeared very abruptly. This gray band lessened in intensity until eventually its appearance resembled that of a typical haze condition. Extremely clear visual observation of the ground within a 60 [degree] arc directly beneath the aircraft was noted."
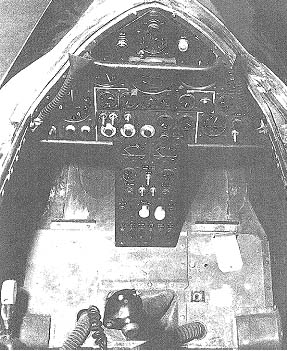
The pilot's cockpit instruments included a Mach meter with a range to only 3.0, an altimeter that went to 100,000 feet (30,480 m), and standard J-8 attitude gyro. Capt. Kincheloe reported that the gyro was completely inaccurate and unusable.
How the X-2 handled in flight. The pilot's control of the X-2 was the tricky part of keeping this thoroughbred where it was supposed to be at any given time. We need to remember that in the early 1950's our understanding of the wind-tunnel aerodynamic predictions and how these affected the dynamics of a Mach 3 airplane were somewhat sketchy. In addition, there were no aerodynamic data for the X-2 above a Mach number of 2.4. Ground test facilities and theory were inadequate to answer the myriad of questions about piloted high speed and high altitude flight. The X-2 was absolutely at the cutting edge of aerospace technology. Cut-and-try was or had been the way it was always done before.
Unfortunately treading a path where nobody else has ever been presents the problem of knowing exactly where and how to proceed. Is there quicksand or a crevasse out there for us to fall into? Surely questions akin to this were being asked by the X-2 team. They were taking calculated risks.
As with previous and contemporary high performance airplanes the X-2 experienced decreased damping of induced motions about all axes at high speed and altitude. The pilots frequently commented about this phenomena concerning the pitch axis. Other airplanes experienced what the pilots described as a "snaking" or "fishtailing" like motion or perhaps like a moving automobile without shock absorbers. In 1947, the XS-1 had experienced a similar problem and was later reported by one of the program engineers that, ". . . in spite of [the] high directional stability, a poorly damped lateral oscillation has been experienced which cannot be readily explained."
From a piloting point of view, Capt. Kincheloe summarized six prevalent problem areas of desired improvement in the X-2 as well as for other contemporary research airplanes such as the X-1, X-1A, etc. These problems included: (1) low horizontal stabilizer effectiveness, (2) a tendency for yaw-to-roll cross axis motion coupling (inertial coupling), (3) decreased supersonic directional stability, (4) degraded high altitude dynamic stability, (5) poor control at high altitude where atmospheric density is very low and (6) out of trim condition due rocket thrust misalignment. Aerodynamics and flight controls entered prominently as potential improvement areas in 5 of the 6 items, but flight controls would play the most important role in future aviation developments. Large variations of key aerodynamic characteristics accompanied by decreased damping of induced motion were becoming more evident in all the high performance experimental airplanes as Mach numbers and altitudes increased. The day when the skilled test pilot could handle any airborne dynamic situation at all Mach numbers, altitudes and "g" with a simplex pilot only stick and rudder command input flight control system was coming to a close and the current stable of research airplanes was proving that, but this is jumping too far into the future.
The X-2 may have displayed areas of desired improvement, but the pilots felt that there was nothing they could not control or that greatly alarmed them. The pilots were experienced and used to 'squirrely' airplanes. The decrease in damping was the natural consequence of increasing speed and altitude resulting in the X-2 being closer to a stability boundary though the airplane remained stable. The X-2 pilots felt that with judicial planning and piloting technique any serious problem would be avoided. This was one of those calculated risks that existed in the field of flight test exploration.
The USAF simulation effort was supported and encouraged by Mr. Richard E. Day, of NACA, leading the effort and as a X-2 program participant and consultant for airplane stability and control. NACA engineers also provided the inputs for the analog computer that consisted of the X-2 equations of motion, the airplane physical characteristics, wind-tunnel and estimated aerodynamic data (up to Mach 2.4 only), and simplified flight control system, cathode ray tube pilot's pseudo out-the-window display and spring-loaded aluminum tube for a stick.
The NACA engineers developed piloting techniques on the simulation and worked with pilots to develop a specific detailed flight plan. The pilots would perform pitch or roll control pulses, at specific flight conditions, by displacing the control stick and then returning it to neutral to produce the familiar oscillation or snaking motion. These pulses were practiced in the simulator and then duplicated, as close as possible, in flight and recorded on the X-2's data acquisition system. The flight data were then compared with the predicted aerodynamic data and adjustments made to the simulator as required.
X-2 pilot, Captain Kincheloe, commented concerning the use of the simulator when he wrote that, ". . . The most valuable assistance given during the program was that of the electrical analog computer Goodyear GEDA. Past experience had shown that in most cases [the aerodynamic characteristics] obtained from flight test maneuvers are [a] close simulation of airplane motions. Original computer [aerodynamic] inputs were derived with the aid of wind tunnel and rocket model tests, manufacturer's estimates and theoretical predictions available at the start of the program. The [aerodynamic] stability derivatives were modified after each flight until the simulator would duplicate the flying characteristics of the X-2. Before each flight, the pilot who was to fly the X-2 was given time at the analog simulator with varying values of the critical [aerodynamic] stability derivatives. At the higher Mach numbers, and higher altitudes, these variations gave flyable, marginal and unflyable conditions. As a result of these buildup flights, it was shown, the low longitudinal control effectiveness would prevent the attainment of too high an altitude by limiting the climb angle. Therefore, to achieve the optimum altitude, it was necessary to develop the optimum technique to establish the desired flight path."
Record speed. On September 27, 1956, Capt. Mel Apt achieved a record speed, at rocket burn-out, of Mach 3.2 at 65,500 feet (19,964 m) which translates to 2,112 mph (3,399 kph).
At Mach 3.2 the X-2 was traveling over 35 miles per minute (56.7 km per minute). On this flight the rocket engine burned several seconds longer than on previous flights and longer than expected. Capt. Apt radioed, "Engine out, I'm turning." At burn-out the X-2 was in a 25 degree left bank; which was fairly typical in the X-2 due to a 0.7 inch (1.8 cm) thrust misalignment. Due to having achieved a higher speed than planned, Capt. Apt was apparently concerned about what he perceived to be his rapid departure from the Edwards test area (he was about 30 miles northeast) so he attempted, momentarily, to level the wings and then to turn left back to Base. He had not seen the Dry Lake at any time during the flight, but was in fact relatively close. He was now flying a 6 ton glider and it was imperative that his landing site, Rogers Dry Lake, be located as quickly as possible. Shortly after Capt. Apt started his turn the X-2 penetrated a flight condition of Mach and "g" that resulted in a violent inertial coupling instability and a total loss of pilot control. The edge of the cliff had been reached and the fall had been initiated. The ensuing motions were violent combinations of roll, pitch, and yaw until a relatively smooth subsonic inverted spin was entered. As viewed later from the cockpit camera, Capt. Apt was observed to move the stick to attempt a standard spin recovery. He never unlocked the rudder and what part this control might have played in effecting a recovery from the spin we can only speculate. Due to the severity of the out of control situation Capt. Apt may have been unconscious or disoriented and at 40,000 feet (12,192 m) he jettisoned the cockpit capsule. Capt. Apt was unable or too low to extricate himself from the capsule in order to use his personal parachute.
The now pilotless X-2 exited the spin righted itself and continued as it executed a long series of undulating glides followed by stalls. The airplane landed in the Desert in wings-level flight at a relatively high rate of descent. The airplane broke into three parts and only slid a few fuselage lengths before coming to rest.
Needless to say the X-2 test team was devastated. They had lost a good friend and their airplane. Their program was over. Perhaps the team should have made different decisions, but we must remember the motto of Edwards; Ad Inexplorata—toward the unexplored or unknown. How did this motto ever originate? Why were they there doing what they did? An entirely different team, equally qualified and dedicated, given the same set of circumstances probably would have done the same.
The investigation that followed didn't look very favorably upon the X-2 test team. There were recriminations to be sure, but there is no need to review them here. The official Air Force report concluded that the fatal turn at peak velocity had led invariably to coupled motion instability. The X-2 certainly wasn't a "fiasco" or a ". . . disaster masquerading as [a] research organization . . ." as at least one aviation historian has stated. How many times have we experienced, over the years, program non participants climb on the critical bandwagon? To be sure there was room for improvement, there always is and nobody understood that better than the X-2 team!
A great deal of information and data came from the X-2 and would be used to the benefit of the highly successful X-15 program. Every facet of the X-15 program benefited from the X-2 experience. It's probably safe to say that the X-15 enjoyed the success it did because of the X-2.
An Unusual Piloting Technique
Recently an unusual piloting technique used by Lt. Colonel Pete Everest was disclosed by prominent retired Grumman Aircraft test pilot turned aviation historian and author, Mr. Corky Meyer. Mr. Meyer related the piloting technique as follows:
In April 1956, Pete gave me a complete X-2 checkout. When this picture [not shown] was taken, he was pointing out the horizontal grab bar that he had installed across the bottom of the instrument panel; he found he had to grasp it whenever the aircraft exceeded Mach 2.5. During earlier flights, he had determined that at that speed, the stability around all three axes of the X-2 approached zero. He therefore correctly reasoned that none of the flight controls must ever be touched from Mach 2.5 until the X-2 had reached its rocket-burnout top speed and decelerated back to Mach 2.5. This simple device that helped to circumvent a possible human frailty fascinated me. I had flown several fighter aircraft approaching instability, and I, too, had found that my raw instinct could all too easily prevail over my common sense under some conditions.
Corky Meyer
The in-flight airplane plus pilot-in-the-loop represents a dynamic closed-loop system. Under some circumstances this dynamic system can be driven unstable by a pilot doing what they would normally do to control the airplane. By freezing or freeing the stick and or rudder command control inputs a particular airplane in certain flight regimes may remain stable. In other words the closed-loop system becomes open-loop; rather like opening a switch. In my experience, it takes an exceptional test pilot to recognize and then accept a situation requiring his removal from a dynamic situation. Pilots just don't like to remove themselves from what they perceive as a controlled situation.
I can also remember that in extreme situations involving already out of control situations, pilots will revert to the way they have been trained to fly. These do this unconsciously in an intense situation in an attempt to regain control. I have proved this to myself by way of testing fully instrumented experimental airplanes. Other experimenters may have had different experiences.
Analytical capabilities, ground-test facilities, and computational tools would later provide an integrated approach so that the entire dynamic system of airplane, flight control system, and human operator could be mathematically modeled so that potential instabilities could be determined before they happened. If, then, we had this capability then we, provided we were clever enough, could circumvent instabilities before they happened.
Certainly Col. Pete Everest must have been an extremely perceptive test pilot to understand that he needed to resort to an unusual mode of control, in his case no control, to avoid a possible catastrophic situation. Relating the "grab bar" certainly was news to this author.
The X-2 in Retrospect
The reader needs to understand why those of us who were involved with experimental flight test at Edwards did what we did and why just being a part of all this was a dream come true. Trying to put the disappointment of losing the X-2 into perspective, we remember the comments of one of NASA's Administrators, James E. Webb, when he said:
Flight testing of new concepts, designs, and systems is fundamental to aeronautics. Laboratory data alone, and theories based on these data, cannot give all the answers . . . . Each time a new aircraft flies, a "moment of truth" arrives for the designer as he discovers whether a group of individually satisfactory elements add together to make a satisfactory whole, or whether their unexpected interactions result in a major deficiency. Flight research plays the essential role in assuring that all the elements of an aircraft can be integrated into a satisfactory system.
The question is; if the integrated elements aren't satisfactory, then what? The X-2 certainly was a new concept. Never before had a piloted airplane achieved what the X-2 had accomplished. Unfortunately the apparently satisfactory elements of this airplane resulted in unexpected interactions and were found to be deficient. It must be remembered that the X-2 was a revolutionary concept in a radical new environment, the edge of space. This was a time of transition. As part of the quest for space the X-2 played a vital role.
In 1984, a prominent aviation historian wrote referring to the X-2, ". . . It highlighted the terrible effects of underestimating the technical complexities involved in developing a radical new aircraft." The technical complexities of the X-2 were not underestimated. The technical complexities were not developed refined or available when required. The X-2 was plowing new ground, developing technology, exploring aeronautics, and advancing our understanding. The X-2 was involved in flights of discovery into the unknown and that was their primary mission. That is why they did what they did and that's what we humans do. In retrospect would the historians have had them cease and desist so that terrible effects could be avoided? I think not.
The X-2 simplex flight control system was not much more sophisticated than that of typical WW II fighters. The inclusion of irreversible hydraulic power-boost for the ailerons and the all-movable horizontal stabilizer was an advancement, but a significant compromise from the desired electrical fly-by-wire system. The rudder remained an all manual system and had to be locked for supersonic flight and unlocked, by the pilot, for subsonic maneuvering. This requirement was probably not duplicated in the simulator for pilot practice due to the relatively simplistic mechanization of this tool.
The X-2 had the aerodynamics and propulsion system to make it the fastest and highest flying airplane the world had ever seen, but lacked a sophisticated multiplex command input flight control system that could have provided artificial stabilization and made this airplane a resounding success.
The Coalescence of Technology
The X-2 was being tested during a period of significant airplane technology transition and in particular the world of flight control system design and development. The technology that could have made the X-2 a resounding success simply was not mature enough to be used.
The development of control technology that included the practical integration of airborne sensor packages, electronics, servo actuators, and control surface power actuators could not have succeeded without the intelligent logic to make these individual elements into complete operating systems. Before this could be accomplished, control technology and theory had to be merged with dynamic analysis. What emerged, in the late 1940's and early to middle 1950's, were analog devices (as opposed to digital) that we call feedback control systems or stability augmentation systems for high performance airplanes. These rapid responding systems, unlike the familiar relatively slow auto-pilot, increased or augmented airplane stability. In some instances these systems could detract from airplane stability if, for example, they introduced unacceptable time delay between sensor and control surface actuator or other undesirable characteristics. Sensor-to-surface signal requirements were very critical. Very high quality sensors, electronics, and actuators were an absolute requirement. Each piece of this complex control system, like a puzzle, is a tremendously practical but complex subject on its own, heavily dependent on practical experience, and relatively complicated mathematical solutions to make it all work together. The elements of this technology had been around for many years, but were in a significant state of coalescence and clarification just when the X-2 could have used them the most. The X-2 exemplified the absolute requirement for high performance airplane stability augmentation.
The solution of the complex mathematical airplane model (the equations of motion) was ideal and well suited for the computers that were emerging in the 1950's. Vacuum tube based analog computers were fast, but the results were more qualitative. Pilots, in a quasi cockpit, could relate to the simulation solutions, via an instrument panel, in the time-domain because analog computers operated second per second in real-time as they "flew" missions in a laboratory. They could establish any desired initial flight conditions "fly," reset and try again. Digital computers, of this era, were slow, but quantitative, repeatable, and precise. These provided solutions of the math model in the frequency-domain. Each had its limitations, but provided accurate solutions to the equations, were complementary and pointed to existing as well as potential problem areas of airplane dynamics. All this would be true provided the formulation and input data were correct or as close as estimates could be made. This was not a cut-and-try or haphazard approach, but was well formulated, analytical, and integrated methodology. This was the realm of the newly evolving discipline of the flight controls engineer who could specifically identify potential airplane dynamic and or pilot controllability problems. When the simulated airplane stability and controllability deficiencies were quantified and verified, a preliminary flight control system configuration could be formulated, tested in the simulator, revised, tested again, and finally accepted.
The entire process was somewhat mysterious and bewildering to some of the old flight test engineers and program managers, who were always in a hurry. This process bordered on black magic, some would say. After all these steps were taken, the final configuration of the flight control system was decided upon, approved by management, then implemented in the airplane using available hardware and finally ground and flight qualified. Short-cuts in this process usually brought or bring unexpected and sometimes disastrous results. These are not simple processes or tasks. Make the entire flight control system digital computer based as they are today and the implementation is orders of magnitude greater.
In the emerging technology, we must also remember the development of the robust transistor that enabled the miniaturization of electronic circuitry. Developed in 1948, the more reliable transistor eliminated the need for bulky, high power consuming, and fragile vacuum tubes in electronic circuitry. Unfortunately all these things were in their dawn of applied development and, excluding the analog computer, unavailable for use in the X-2 program when it was reaching for the stars.
Bell engineers must have had a tantalizing inkling of all this coming technology and their practical developments when they proposed an electrical fly-by-wire rather than a simplex mechanical linkage flight control system for the X-2. Bell Aircraft and Bendix engineers must have been very disappointed when, after several years of developmental work, this system was abandoned. Practical fly-by-wire systems took about 20 more years of development before they begin to emerge. The X-2 development team's reach, as they were learning, exceeded their technological grasp.
Yes, if I might express an opinion, the X-2 could have been made to fly well without much modification, but the technology just wasn't there in a mature form to be implemented then. If we were doing the X-2 today, in our wisdom of hindsight, we would add pitch, roll, and yaw angular rate damping for stability augmentation. We would provide the rudder with a hydraulic actuator and interconnect it with the aileron with a schedule of Mach and "g" for making coordinated turns at any Mach or "g," and perhaps suggest to the aerodynamicists that they find a way to add a bit more directional stability.
Hypersonic Flights to Space and Then Earth Orbit
The next and most significant experimental rocket powered program conducted at Edwards was the hypersonic X-15. The X-15 program improved on all the hardware and operational deficiencies experienced in the X-2. The list is too numerous to include here, but for example the X-15 roll control was provided by differential deflection of the all-movable horizontal stabilizer (not wing ailerons with their adverse yaw problem), a ventral fin was added in an attempt to increase directional stability, but later the lower portion was eliminated when it was determined to be destabilizing. Each X-15 had a stability augmentation system, and heat resistant alloy structure of Inconel-X. For flight outside the Earth's atmosphere, where aerodynamic surfaces were useless, small hydrogen-peroxide thrusters were provided for attitude control on each airplane. The third, and last, X-15 (tail number 6672) included a MH-96 variable self adaptable flight control system that was designed to give the pilot consistent airplane response regardless of flight condition. This system, while not trouble free, proved quite successful.
Operationally, the X-15 pilots were always aware of their position in space, ground-track, and where the nearest dry lake bed was for an emergency landing if required. They would be constantly updated as flight progressed by their cockpit instrumentation and by a ground controller.
The X-15's first series of research flights began in early 1960, using two XLR-11 rocket engines following North American Aviation's demonstration flights. The X-15 (tail number 6670) didn't exceed Mach 3 until the middle of 1960, over 3.5 years after the X-2 had set a new world's speed record of Mach 3.2 and it didn't exceed the X-2's altitude record of 126,200 feet (38,466 m) until August 1960, 4 years after the X-2.
The X-2 expanded our understanding of mankind's next step, to the space age, and it would be upon us sooner than we thought. Sputnik ('Fellow Traveler') 1, man's first artificial satellite, was put into Earth orbit on October 4, 1957.
The Bell X-2's problem was that it was in the right place at the wrong time. It was ahead of its time in many respects. The X-2 was indeed the shadow of the future and the contributions and sacrifices made by the entire design and flight test teams to further our knowledge and understanding of high speed flight to the edges of space must be remembered by aviation history.
End-notes of interest
In 1956, the movie "Toward the Unknown" was produced that dramatized the story of the X-2. The hero of the movie was a daring test pilot, played by Mr. William Holden. By his exceptional exploits in the sky, he tried to win back the heroine played by Ms. Virginia Leith. Like most Hollywood productions, any resemblance with historical fact in the movie may have been purely coincidental. In the movie story-line, the airplane did crash in the desert and this production may have provided the public with an interval of high drama about experimental airplanes and the flight test business.
The motto of Edwards Air Force Flight Test Center is, in Latin, Ad Inexplorata. The title of the 1956, movie is (was) "Toward the Unknown." The movie title would seem to be an English translation of the Latin motto.
For the 1989 television program Quantum Leap, a replica of the X-2 was constructed. The pieces of this replica are still in storage in the Planes of Fame Museum in Chino, California.
More recently the 2000, movie Space Cowboys included a black-and-white prologue that featured what appeared to be a two-place X-2 as it flashed low over Rogers Lake and in the 1958, skies over Edwards until the daring test pilot with a cavalier attitude ripped one wing off. Fortunately for the star and costar their ejection from the airplane was successful. The few microseconds of seeing the X-2 was rather entertaining if not completely realistic as far as the airplane configuration and date were concerned.
After the 1956 crash the remains of the X-2 were brought to a hangar on Edwards AFB and placed in their correct relative positions until the accident investigation was complete. NACA engineers suggested that the X-2 be salvaged and repaired for use in a hypersonic flight research program. This proposal was scraped and the X-2 remains were subsequently buried someplace on the vast Edwards Air Force Base complex. Not a fit ending for a remarkable airplane but the conclusion of a program that emerged somewhat prematurely as a dream transformed to reality from the minds of men and women. The X-2 deserves more than just a footnote in aviation history.
Foreword | Article | Bibliography | About the Authors
|